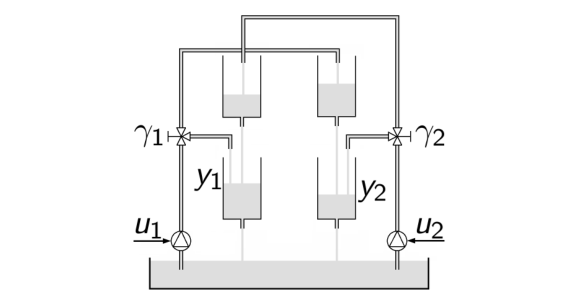
Adaptive model predictive control of constrained multiple-input multiple-output systems and its application to the quad tank system
I.I. Sirmatel , Automatic Control Laboratory, ETH Zurich, 2014

I.I. Sirmatel , Automatic Control Laboratory, ETH Zurich, 2014
I.I. Sirmatel, N. Geroliminis , IEEE 55th Conference on Decision and Control (CDC), 2016
I.I. Sirmatel, N. Geroliminis , IEEE Transactions on Intelligent Transportation Systems, 2017
I.I. Sirmatel, N. Geroliminis , 20th World Congress of the International Federation of Automatic Control, 2017
I.I. Sirmatel, N. Geroliminis , 2018 European Control Conference (ECC), 2018
I.I. Sirmatel, N. Geroliminis , Transportation Research Part B: Methodological, 2018
M. Yildirimoglu, I.I. Sirmatel, N. Geroliminis , Transportation Research Part B: Methodological, 2018
Y. Zhang, I. I. Sirmatel, F. Alasiri, P. A. Ioannou, N. Geroliminis , 21st International Conference on Intelligent Transportation Systems (ITSC), 2018
I.I. Sirmatel, N. Geroliminis , 2019 European Control Conference (ECC), 2019
I.I. Sirmatel, N. Geroliminis , IEEE Transactions on Intelligent Transportation Systems, 2019
I.I. Sirmatel , Urban Transport Systems Laboratory (LUTS), EPFL, 2020
Y. Ren, Z. Hou, I.I. Sirmatel, N. Geroliminis , Transportation Research Part C: Emerging Technologies, 2020
I.I. Sirmatel, N. Geroliminis , 2020 European Control Conference (ECC), 2020
I.I. Sirmatel, N. Geroliminis , Control Engineering Practice, 2021
I.I. Sirmatel, D. Tsitsokas, A. Kouvelas, N. Geroliminis , Transportation Research Part C: Emerging Technologies, 2021
P. Zhu, I.I. Sirmatel, G. Ferrari Trecate, N. Geroliminis , 2022 European Control Conference (ECC), 2022
I.I. Sirmatel, M. Yildirimoglu , Transportation Research Part C: Emerging Technologies, 2023
P. Zhu, I.I. Sirmatel, G. Ferrari Trecate, N. Geroliminis , IEEE Transactions on Control Systems Technology, 2024
C.V. Beojone, P. Zhu, I.I. Sirmatel, N. Geroliminis , Transportation Research Part C: Emerging Technologies, 2024